

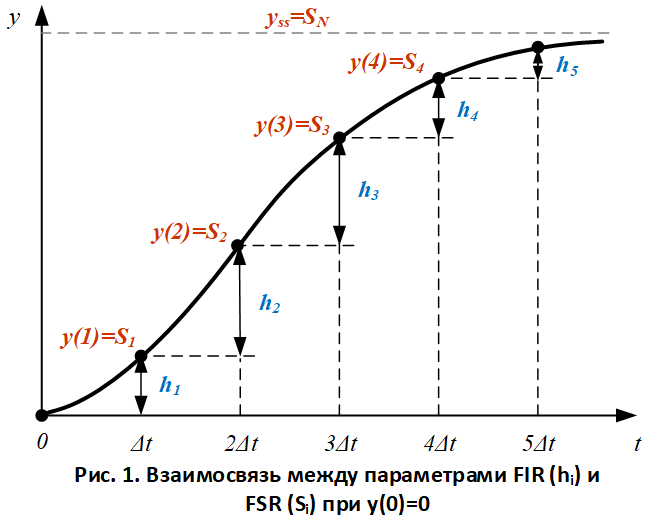
Параметрами моделей являются коэффициенты и связанные между собою (рис. 1), что позволяет вывести FIR из FSR и наоборот. Согласно модели FIR выход y определяется абсолютными значениями входной переменной u, а в случае FSR – изменениями ![]() . Количество тактов дискретизации N и шаг дискретизации
. Количество тактов дискретизации N и шаг дискретизации ![]() выбираются таким образом, чтобы произведение
выбираются таким образом, чтобы произведение ![]() не было меньше времени достижения выходом y нового установившегося значения
не было меньше времени достижения выходом y нового установившегося значения ![]() (времени переходного процесса).
(времени переходного процесса).
Важной особенностью обоих моделей является возможность вычисления последующего значения выхода y(k+1) на основе значений входной величины в предыдущие дискретные моменты времени, т.е. возможность прогнозирования значения y в будущем. Кроме того, прогнозирование осуществляется с учетом запаздывания в системе.
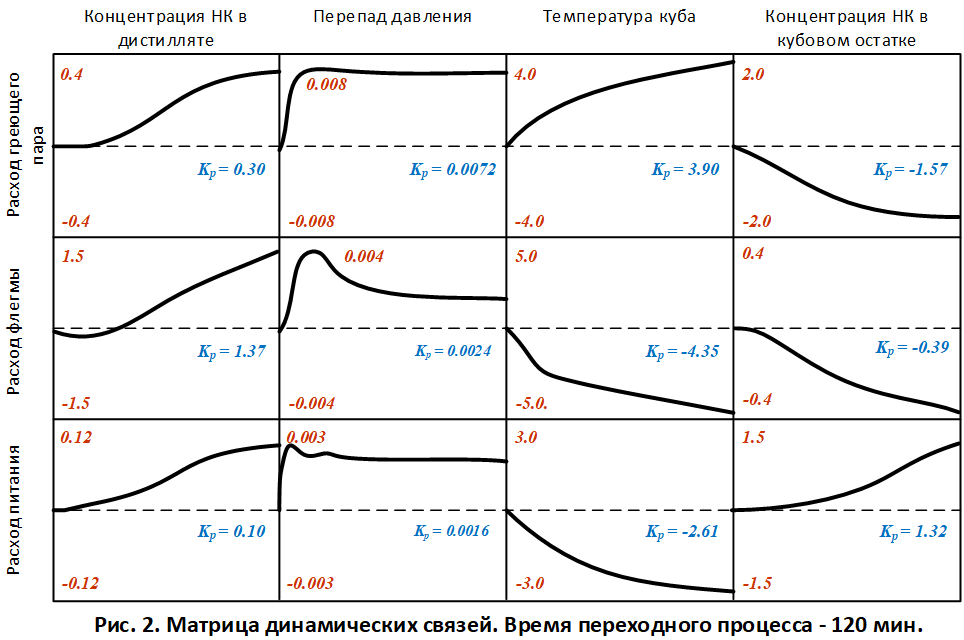
Контроллер МРС является многопараметрическим и многосвязным, следовательно, в отличии от САУ, состоящей из множества несвязанных контуров регулирования, в MPC учитывается то, что одна переменная MV может влиять на несколько CV и в то же время одна CV может зависеть от нескольких MV. Введя допущение о линейности процесса и используя принцип суперпозиции, составим FSR для случая, когда в системе два входа u1 и u2 и два выхода y1 и y2. Тогда прогнозные значения для выходных параметров при y1(0)=y2(0)=0:



В ходе реализации алгоритма решается оптимизационная задача №1, в которой определяются целевые значения CV ![]() и соответствующие уставки MV
и соответствующие уставки MV ![]() , обеспечивающие в дискретные моменты времени минимум/максимум критерия эффективности. Если критерий имеет линейную форму, то используется метод линейного программирования, если же критерий задан в квадратичной форме – метод квадратичного программирования. В частном случае критерий имеет вид:
, обеспечивающие в дискретные моменты времени минимум/максимум критерия эффективности. Если критерий имеет линейную форму, то используется метод линейного программирования, если же критерий задан в квадратичной форме – метод квадратичного программирования. В частном случае критерий имеет вид:


Весовые коэффициенты![]() задаются специалистами планово-экономической и производственно-технической служб исходя из экономической конъектуры и приоритетности MV, CV. Своевременное определение весовых коэффициентов экономического характера для отдельного процесса или установки в составе производства может оказаться сложной задачей, что приводит к исключению из критерия J1 экономической составляющей. В этом случае решающая роль отводится весовым коэффициентам, определяющим приоритет между параметрами. В частности, критерий может быть приравнен одному из CV (выход продукта, концентрация ключевого параметра на выходе и т.д.) или MV (расход теплоносителя, расход реагента и т.д.).
задаются специалистами планово-экономической и производственно-технической служб исходя из экономической конъектуры и приоритетности MV, CV. Своевременное определение весовых коэффициентов экономического характера для отдельного процесса или установки в составе производства может оказаться сложной задачей, что приводит к исключению из критерия J1 экономической составляющей. В этом случае решающая роль отводится весовым коэффициентам, определяющим приоритет между параметрами. В частности, критерий может быть приравнен одному из CV (выход продукта, концентрация ключевого параметра на выходе и т.д.) или MV (расход теплоносителя, расход реагента и т.д.).
Особое значение в работе алгоритма отведено наличию или отсутствию системы более высокого уровня Real-Time Optimization (RTO). Если система RTO внедрена на производстве, то критерий J1 при тех же ограничениях принимает иной вид:

Величины ![]() – весовые коэффициенты,
– весовые коэффициенты, ![]() – рекомендуемые уставки, рассчитываемые RTO после достижения процессом стационарного состояния (неизменности параметров во времени).
– рекомендуемые уставки, рассчитываемые RTO после достижения процессом стационарного состояния (неизменности параметров во времени). ![]() остаются постоянными в течение всего периода стационарности. В основе расчета используется имитационная модель и экономические показатели производства в целом, что позволяет RTO координировать одновременную работу комплекса контроллеров APC. Имитационная модель RTO не учитывает динамические особенности поведения отдельных процессов, такие как запаздывание, колебательность переходного процесса, наличие шумов измерения и т.д. Более того, стационарность обусловлена рядом допущений. Таким образом, расчет контроллером MPC величин
остаются постоянными в течение всего периода стационарности. В основе расчета используется имитационная модель и экономические показатели производства в целом, что позволяет RTO координировать одновременную работу комплекса контроллеров APC. Имитационная модель RTO не учитывает динамические особенности поведения отдельных процессов, такие как запаздывание, колебательность переходного процесса, наличие шумов измерения и т.д. Более того, стационарность обусловлена рядом допущений. Таким образом, расчет контроллером MPC величин ![]() в дискретные моменты времени обоснован реальной динамикой процесса и необходимостью обеспечения устойчивости системы, а их приближение к
в дискретные моменты времени обоснован реальной динамикой процесса и необходимостью обеспечения устойчивости системы, а их приближение к ![]() является стратегической экономической задачей в контексте всего производства.
является стратегической экономической задачей в контексте всего производства.
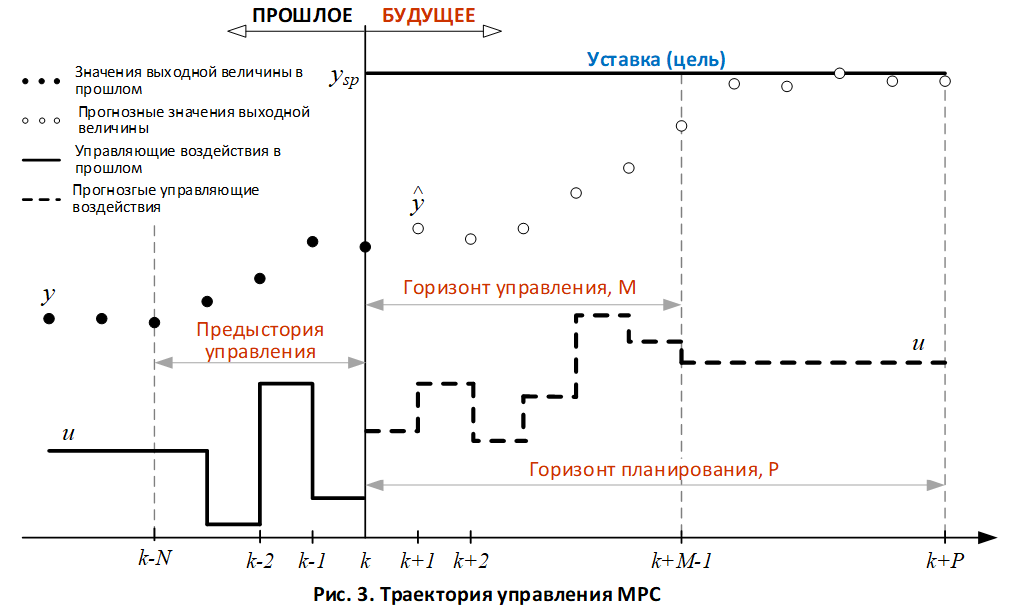
Алгоритм предиктивного управления с обратной связью рассчитывает последовательность управляющих переменных ![]() , обеспечивающую достижение контролируемыми величинами целевых значений на горизонте управления (рис. 3).
, обеспечивающую достижение контролируемыми величинами целевых значений на горизонте управления (рис. 3).
Рассмотрим частный случай построения траектории управления для одной выходной переменной при единственном управлении .

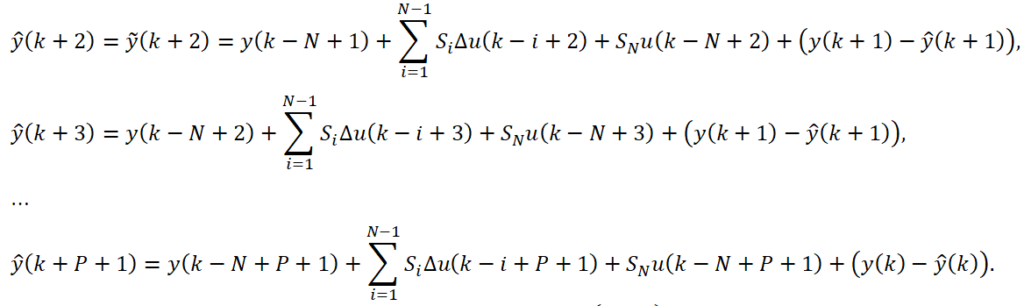
В расчете прогноза ![]() осуществляется сдвиг на один временной такт предыстории управления: выводится точка
осуществляется сдвиг на один временной такт предыстории управления: выводится точка ![]() , в результате чего начальным моментом становится
, в результате чего начальным моментом становится ![]() . При этом неизвестное конечное изменение управления
. При этом неизвестное конечное изменение управления ![]() при i=1 под знаком суммы принимается
при i=1 под знаком суммы принимается ![]() . Тогда:
. Тогда:


Траектория достижения контролируемой величиной CV целевого значения ![]() на горизонте планирования P должна быть оптимальной. Важно не только быстро достичь целевого значения, но и предотвратить существенное изменение манипулируемого параметра. С этой целью в каждый дискретный момент времени после расчета горизонта планирования строится горизонт управления
на горизонте планирования P должна быть оптимальной. Важно не только быстро достичь целевого значения, но и предотвратить существенное изменение манипулируемого параметра. С этой целью в каждый дискретный момент времени после расчета горизонта планирования строится горизонт управления ![]() . Решается оптимизационная задача №2, в которой критерий оптимизации имеет вид:
. Решается оптимизационная задача №2, в которой критерий оптимизации имеет вид:

Весовые коэффициенты ![]() , задаются исходя из приоритетности входных и выходных переменных с учетом требования устойчивости процесса.
, задаются исходя из приоритетности входных и выходных переменных с учетом требования устойчивости процесса.
Далее реализуется оптимальное управление только лишь в k+1-ый момент ![]() , измеряется фактическое и строится новый прогноз на горизонте P:
, измеряется фактическое и строится новый прогноз на горизонте P:
После определяется горизонт управления, реализуется ![]() и т.д.
и т.д.
В общем случае, когда процесс характеризуется множеством входных ![]() и выходных переменных
и выходных переменных ![]() , после расчета горизонта планирования для всех выходных переменный строится горизонт управления
, после расчета горизонта планирования для всех выходных переменный строится горизонт управления ![]() , В этом случае критерий
, В этом случае критерий ![]() принимает вид:
принимает вид:


Особо необходимо обратить внимание на выбор величин горизонтов управления и планирования. Увеличение горизонта управления M делает контроллер MPC более агрессивным и существенно увеличивает объем вычислений. Как правило, величина M выбирается в диапазоне ![]() . Уменьшение горизонта планирования P также делает контроллер более агрессивным. Величина P выбирается больше M с целью оценки поведения
. Уменьшение горизонта планирования P также делает контроллер более агрессивным. Величина P выбирается больше M с целью оценки поведения ![]() по истечению горизонта управления при постоянном последнем
по истечению горизонта управления при постоянном последнем ![]() . Горизонт принимает значение P=M+N.
. Горизонт принимает значение P=M+N.
Увеличение горизонта планирования на величину N позволяет оценить весь отклик CV на последнее изменение ![]() .
.