В 60-х гг. XX столетия методы оптимального управления на основе прогнозирующей модели реализованы Рудольфом Калманом и др. в алгоритмах Linear Quadratic Gaussian Controller (LQG) (Kalman filter). Фильтр Калмана позволяет предугадывать, каким будет состояние линейной системы в следующий момент времени при наличии неизмеримых параметров и «шумов» в системе.
В конце 70-х гг. J. Richalet и др. представили алгоритм управления Model Predictive Heuristic Control (MPHC) и соответствующее программное обеспечение IDCOM. Базовый принцип MPHC – построение динамической прогнозирующей модели процесса на основе импульсной характеристики.
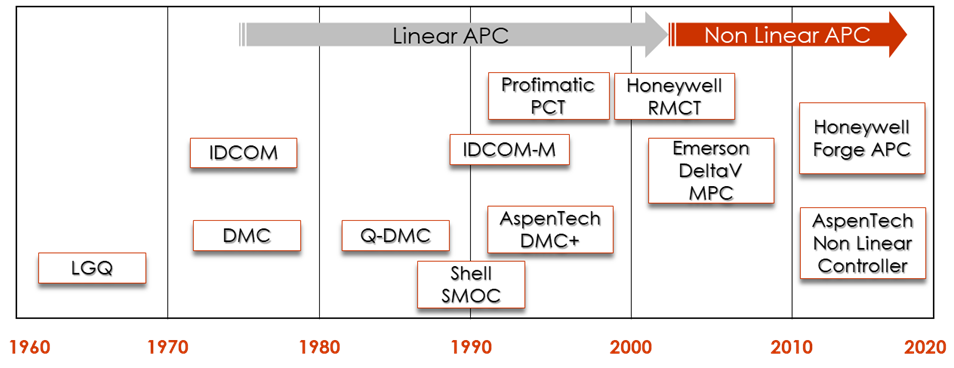
Этапы развития СУУТП
В рамках промышленного эксперимента оценивалась кривая отклика контролируемой переменной (CV) на импульсное возмущение, вводимое по каналу регулирования воздействием управляющей переменной (MV). Модель составлялась в виде взвешенной суммы значений всех MV с весовыми коэффициентами, определяемыми по кривой отклика в дискретные моменты времени. Прогнозное значение CV рассчитывалось моделью на интервале времени, предшествующем горизонту прогнозирования. В условиях промышленной эксплуатации использование предложенной модели требовало ее обновления не менее одного раза в год. Решение MPHC впервые использовано на установке каталитического крекинга.
В это же время C. Culter (DMC Corporation) и B. Ramaker (SHELL Oil Company) представили альтернативный алгоритм управления Dynamic Matrix Control (DMC). В основе DMC также использовалась прогнозирующая динамическая модель процесса. Однако в отличии MPHC модель строилась на основе кривой отклика на ступенчатое возмущение и составлялась в виде матрицы коэффициентов динамических связей между CV и MV. Динамические связи имели вид линейных уравнений в отклонениях. Уравнения связывали изменение CV с изменениями всех MV вследствие одного или серии ступенчатых возмущений. Кроме того, в уравнениях модели могли учитываться измеримые возмущения (DV) в системе. Поисковые коэффициенты при отклонениях MV составляли основу матрицы расчета прогнозного значения CV. Впервые алгоритм DMC был апробирован компанией Shell.
Особенно важно то, что решениях MPHC и DMC позволяли в некоторой степени реализовать полноценное многосвязное управление процессом на основе допущений о его линейности и введения принципа суперпозиции. Кроме того, в данных системах впервые определение управляющих параметров осуществлялось на основе компьютерных вычислений в режиме онлайн, при этом в алгоритмах поиска учитывались ограничения на MV и CV. MPHC и DMC по праву являются первым поколением прогнозирующих контроллеров MPC (Model Predictive Control), составляющих основу современных APC, а решения IDCOM до сих пор применяются многими производителями.
В течение 80-х гг. предложенные алгоритмы улучшались и получили широкое применение, в т. ч. в нефтепереработке, где их преимущества оказались весьма ощутимыми. Инженерные команды продолжили работу над методами обработки данных и, в особенности, алгоритмами поиска MV, обеспечивающими минимальное отклонение CV от прогнозного значения. Наличие ограничений на MV и CV, линейность системы и квадратичный критерий оптимизации требовали от разработчиков внедрения эффективных методов математического программирования. В это время представлена разработка второго поколения MPC: QDMC (Quadratic DMC), в которой алгоритм поиска минимума критерия основан на методе квадратичного программирования.
В конце 80-хх специалисты Shell Research представили Shell Multivariable Optimizing Controller (SMOC). SMOC сочетал в себе линейные модели в пространстве состояний (SSM), а также фильтр Калмана для определения состояния процесса и выявления неизмеримых возмущений, действующих на процесс. В это же время представлен алгоритм IDCOM-M с использованием двух критериев оптимальности для группы входных параметров (MV, DV) и группы выходных параметров (CV). Решения SMOC и IDCOM-M являются третьим поколением MPC.
В 90-е гг. к разработкам IDCOM-M и SMOC добавились системы, некоторые из которых хорошо известны и по сей день:
- HIECON (Adersa),
- PCT algorithm (Profimatics),
- RMPC (Honeywell).
- DMC-plus (AspenTech).
Решения RMPC и DMC-plus относятся к четвертому поколению MPC. Функционал программных продуктов второй половины 90-х существенно расширился:
- традиционный для сегодняшнего времени оконный интерфейс,
- наличие инструментов многокритериальной оптимизации,
- улучшенные алгоритмы идентификации модели процесса,
- средства разработки виртуальных анализаторов.
Четвертое поколение контроллеров MPC и соответствующие продвинутые программные решения являются системами APC в привычном понимании сегодняшнего дня.
В целом, данный период можно охарактеризовать как время поглощения и укрупнения компаний-разработчиков, в чем особо преуспели AspenTech и Honeywell. В 1999 г. Shell создала альянс с Yokogawa Electric Corporation по продвижению продукта SMOC.
Именно в 1990-х и начале 2000-х гг. технология APC получила широкое коммерческое распространение в мире благодаря достигнутым экономическим эффектам и активному маркетинговому продвижению со стороны AspenTech, Honeywell и Shell. В 2000 г. в мире насчитывалось около 4500 систем APC, большая часть которых была внедрена в нефтепереработке и в нефтехимии.
Сегодня основными ПРОИЗВОДИТЕЛЯМИ APC являются:
- Honeywell (Profit Suite), США;
- Aspen Tech (DMCPlus), США;
- Yokogawa (SMOC, PACE), Япония;
- IPCOS (IncaAPC), Бельгия.
- Emerson (DeltaV MPC), США;
- Schneider Electric / AVEVA, Франция;
- Siemens (gPROMS), Германия;
- HollySys (HOLLiAS APC), Китай.
Классические контроллеры APC имеют традиционную модель в виде матрицы линейных динамических связей между управляющими и контролируемыми переменными (Linear APC) с неизменными коэффициентами усиления (Gain коэффициенты). Основным недостатком такой модели является невозможность обеспечения качественного ведения процесса в условиях регулярной смены технологического режима либо перехода на новый вид сырья, что особенно критично для процессов химического и нефтехимического синтеза с ярко выраженной нелинейностью взаимосвязей между параметрами. Непостоянство технологического режима и нелинейность процесса приводят к необходимости корректировки Gain коэффициентов, порою весьма существенной – до увеличения/уменьшения на порядок и более. В этой связи актуально стремление производителей к созданию нелинейных контроллеров APC (Non Linear APC).
В настоящее время отличительными особенностями Non Linear APC от ведущих производителей (Honeywell, Aspen Tech) является наличие функций адаптации модели (калибровки Gain коэффициентов) на основе технологий Machine Learning (ML) и Artificial Intelligence (AI). Maschine Learning (машинное обучение) и Artificial Intelligence (искусственный интеллект) используются для создания «умных» самообучаемых моделей контроллеров APC с помощью нейросетевых и статистических методов непрерывного анализа больших массивов исторических и текущих данных. ML и AI позволяют:
- отсортировать «плохие» данные в истории процесса;
- установить наиболее взаимосвязанные управляющие и контролируемые переменные на этапе разработки модели;
- осуществить идентификацию модели;
- выполнить адаптацию модели СУУТП с учетом меняющихся условий эксплуатации и нелинейности процесса.